今回は、障害物に奥行きを与え、Objパーティクルが障害物を避けるためのターゲットポイントの位置を調整しました。
ターゲットポイントの位置はClosest Point等のちょっとした数学、算数を使いながら求めていきます。Closest Pointについては、以前の記事で触れました。
こういった内容で進めていきますが、ノードの組み方を説明していくと時間がかかってしょうがないので考え方だけを記事にしていけたらと思います。
はじめに、完成動画をご覧ください。
完璧です。と言いたい所なのですが、障害物が複雑に複数配置されていると破綻してしまいますorz
今回はそうならないように、障害物を配置していますw
下図が今回調整した大まかな点になります。

前回から障害物を変更し浮き上がった問題を調整するといった感じです。
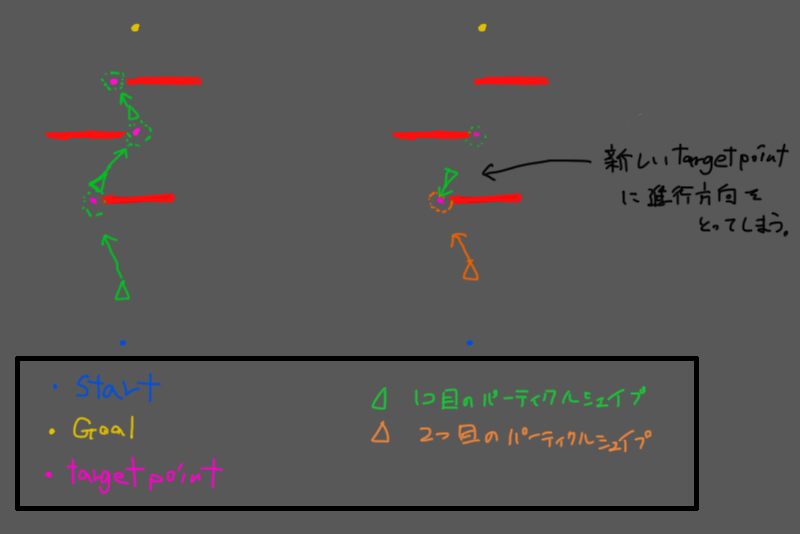
では、どのようにターゲットポイントの位置を調整していくかを簡単に図にしました。
アプローチは、色々あると思われますがチュートリアル通りに行いました。

このような感じでターゲットポイントを設定しています。
③の式は自身手こずったので取り上げます。
式だけ見ると算数なんですよね。これ見てパッと理解できず算数力のなさにへこみました。
基礎筋トレしていかないと、筋力が全く足りないです。

最後に、今回はノードの構成というより何をやっているのかに焦点を当てていきました。
こういう何をやっているのかがある程度わかるとすんなり進むと思います。
これでようやく、Joe Scarr氏のDVDのSquirlArt CROWD SETUPSをほぼ終えました。
最初このチュートリアルに入ったときに、ノードの構成&エクスプレレッションをみて絶望的でしたが、時間かけて少しづつ進めるうちに理解できるようになりました。そして、多くを学ぶことができました。
これまでを見るとわかるとおり数学が多く使われています。
ツールはどんどん新しく変化していきますが数学は変わりません。
と、どこかの本に書いてありましたw
なのでこのチュートリアルは数学を学べるという意味で強く、おススメしますw
もう一つの感想として、このシステムを完璧にしようとすると、キリがないですw
これは、どのシステムにもいえることかもしれませんね。
自身が大きなシステムとかプログラムとか組んだことないからわからないですが見極めも肝心だと思いました。やっていると、どんどんアイデアが浮かぶものです^^あーしたい、こーしたいと。
このチュートリアルでも完璧なシステムに達していないと思います。実際、障害物の配置によって破綻してます。
そこで、SquirlArt CROWD SETUPS最後のflowField 2Dの項目があります。
これはスプラインでパーティクルを誘導するといったアーティストよりな方法をとっています。
なので、全てをプロシージャルにするのは気持ちよいのと思いますが、見極めが肝心ということも勉強になりました。